
در دهه 1960 ، استاد MIT، سیمور پاپرت، پروژهای به ظاهر ساده به دانشجویانش واگذار کرد: متصل کردن یک دوربین به کامپیوتر و آموزش دادن به آن برای توصیف آنچه میبیند با تقسیم تصاویر به اجسام و پسزمینهها. کاری که به نظر ساده میرسید، پایه و اساس یکی از انقلابیترین حوزههای علوم کامپیوتر یعنی بینایی ماشین شد. امروزه، علم فراتر از آموزش ماشینها برای "دیدن" تصاویر دوبعدی رفته و به آنها امکان داده که جهان را به صورت سهبعدی درک کنند. این پیشرفت امکاناتی مانند خودروهای خودران، تشخیصهای پزشکی دقیق و واقعیت افزوده را ممکن ساخته است.
این مقاله به دنیای جذاب بینایی ماشین سهبعدی، فناوریها، کاربردهای واقعی، چالشها، دلیل اهمیت آن به عنوان یکی از ارکان هوش مصنوعی مدرن و همچنین معرفی شرکتهای پیشگام در این حوزه میپردازد.
بینایی ماشین سهبعدی دقیقاً چیست؟
بینایی ماشین سهبعدی به این معنی است که به ماشینها، درست همانطور که انسانها میتوانند دنیای اطراف خود را ببینند، توانایی "دیدن" جهان به صورت سهبعدی داده شود. در حالی که بینایی دوبعدی سنتی فقط تصاویر تخت را میشناسد، بینایی سهبعدی فراتر رفته و عمق، فاصله و روابط بین اشیاء در فضا را نیز درک میکند. این لایه اضافه از درک تصاویر، برای کارهایی که به تشخیص دقیق فضایی نیاز دارند، ضروری است. این ویژگی توانسته پیشرفتی اساسی در فناوری بینایی ماشین ایجاد کرده و آن را به گزینهای ایدهآل برای استفاده در حوزههای مختلف رباتیک تبدیل کند.
بینایی ماشین چگونه کار میکند؟
بینایی ماشین شامل مجموعهای از الگوریتمها، تکنیکها و اصول است که به ماشینها امکان میدهد دادههای بصری مانند تصاویر و ویدئوها را پردازش، تحلیل و تفسیر کنند. این فناوری با استفاده از یادگیری ماشین، یادگیری عمیق، شبکههای عصبی و پردازش تصویر، به سیستمها کمک میکند تا اطلاعات معناداری از تصاویر استخراج کنند. فرایند بینایی ماشین با دریافت دادههای بصری از دوربینها یا حسگرها آغاز میشود. سپس تصاویر وارد مرحله پیشپردازش میشوند تا نویزها حذف شده و کیفیت بصری آنها برای تحلیل بهتر افزایش یابد.
در ادامه، ویژگیهای متمایز مانند لبهها، بافتها یا رنگها از تصویر استخراج میشود که به سیستم در تحلیل دقیقتر کمک میکند. با آموزش مدلهای هوش مصنوعی، ماشین قادر میشود اشیاء را شناسایی و در دستههای مختلف طبقهبندی کند. همچنین، سیستم میتواند موقعیت دقیق اشیاء را تشخیص داده و حتی در تصاویر متوالی آنها را بیابد. ترکیب این مراحل به سیستمهای بینایی ماشین امکان میدهد از درک ساده تصویر فراتر رفته و تحلیلهای پیچیده بصری را در کاربردهای متنوعی همچون صنعت، امنیت، پزشکی و خودروهای خودران ارائه دهند.
فناوریهای کلیدی در بینایی ماشین سهبعدی
برای درک بینایی ماشین سهبعدی، باید به دو حوزه کلیدی پرداخت: "ماشینها چگونه میبینند" و "ماشینها چگونه فکر میکنند". این دو مؤلفه با همکاری یکدیگر به ماشینها امکان تفسیر و تعامل با جهان در سه بعد را میدهند.
ماشینها چگونه میبینند: حسگرها و جمعآوری دادهها
برای اینکه ماشینها بتوانند جهان را بهصورت سهبعدی درک کنند، نیازمند حسگرهایی هستند که نهتنها اطلاعات بصری مانند رنگ، بافت و شکل را جمعآوری کنند، بلکه بتوانند دادههای عمقی مانند فاصله، ضخامت و موقعیت اشیاء را نیز در اختیار کاربر قرار دهند. در ادامه با مهمترین انواع این حسگرها آشنا میشویم:
دوربینهای مونوکولار یا تکلنزی
دوربینهای مونوکولار (Monocular Cameras) یکی از رایجترین ابزار در بینایی ماشین سهبعدی هستند. این نوع دوربینها تنها از یک لنز استفاده میکنند و برخلاف سیستمهای استریو، بهتنهایی قادر به تشخیص مستقیم عمق نیستند. اما هنگامی که از الگوریتمهای پیشرفته تحلیل و ترکیب تصاویر استفاده کنند قادر به بازسازی ساختار سهبعدی محیط اطراف خواهند بود. به عبارت دیگر، دوربین مونوکولار با بهرهگیری از دادههای دوبعدی میتواند نقشهای سهبعدی از جهان پیرامون ایجاد کند.
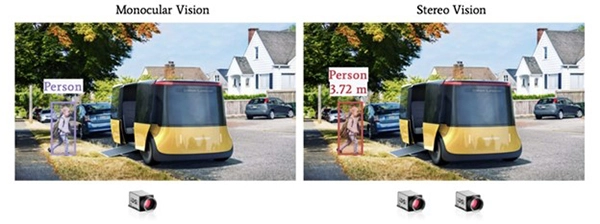
دوربینهای استریو
دوربینهای استریو (Stereo Cameras) نوع دیگری از حسگرهای بینایی ماشین سهبعدی هستند که با شبیهسازی بینایی دوچشمی انسان کار میکنند. این دوربینها دارای دو لنز مجزا بوده و تصاویر را از دو زاویه مختلف ثبت میکنند. با مقایسه اختلاف بین این دو تصویر، که به آن disparity گفته میشود، میتوان عمق و فاصله دقیق اشیاء را در محیط اندازهگیری کرد. این روش امکان تشخیص مستقیم فاصله اشیاء را فراهم میآورد و برای سیستمهایی که نیازمند درک دقیق و واقعگرایانه از محیط اطراف هستند بسیار مناسب است.
دوربینهای RGB-D
از دیگر نمونههای حسگر در حوزه بینایی ماشین سهبعدی میتوان به دوربینهای پیشرفته RGB-D اشاره کرد. این نوع دوربینها توانایی ثبت همزمان تصاویر رنگی (RGB) و دادههای عمقی (Depth) را دارند. معمولاً برای اندازهگیری عمق از فناوریهایی مانند نور مادونقرمز و حسگرهای زمان پرواز (Time-of-Flight) استفاده میکنند، که به آنها امکان میدهد فاصله دقیق اجسام را به صورت real time محاسبه کنند. این قابلیت باعث میشود دوربینهای RGB-D برای کاربردهای نیازمند پردازش سریع و دقیق، مانند بازیهای ویدیویی، رباتیک و واقعیت افزوده بسیار مناسب باشند. یکی از مشهورترین نمونههای استفاده از این فناوری، سنسور Microsoft Kinect است که در کنسولهای بازی مایکروسافت به کار گرفته شده و تحولی بزرگ در تعامل انسان با ماشین به وجود آورده است.

LiDAR یا تشخیص و اندازهگیری با نور
فناوری LiDAR یا تشخیص و اندازهگیری با نور، یکی از پیشرفتهترین روشهای نقشهبرداری سهبعدی است که با ارسال پالسهای لیزری به سمت اشیاء و اندازهگیری زمان بازگشت این امواج، فاصله دقیق تا هر جسم را محاسبه میکند. این سیستم قادر است در هر ثانیه میلیونها داده جمعآوری کرده و با استفاده از آنها نقشههای سهبعدی بسیار دقیق و با جزئیات بالا ایجاد نماید. یکی از مهمترین ویژگیهای LiDAR دقت بالای آن حتی در شرایط نوری نامناسب است، که این امکان را میدهد تا در محیطهای تاریک یا مهآلود نیز عملکرد قابلاطمینانی داشته باشد. علاوه بر این، توانایی اسکن محیط در مقیاس وسیع باعث شده است تا LiDAR در صنایع مختلف به ویژه در خودروهای خودران کاربردی حیاتی پیدا کند.
ماشینها چگونه فکر میکنند: مسئلهها و راهحلها در بینایی سهبعدی
پس از جمعآوری دادههای بصری و عمقی، ماشینها برای پردازش و تفسیر این اطلاعات از الگوریتمهای پیچیدهای استفاده میکنند که هر کدام به طور خاص برای انجام وظایف معین طراحی شدهاند. این الگوریتمها به ماشینها کمک میکنند تا محیط اطراف را بهتر درک کرده و واکنشهای هوشمندانهای به شرایط مختلف نشان دهند.
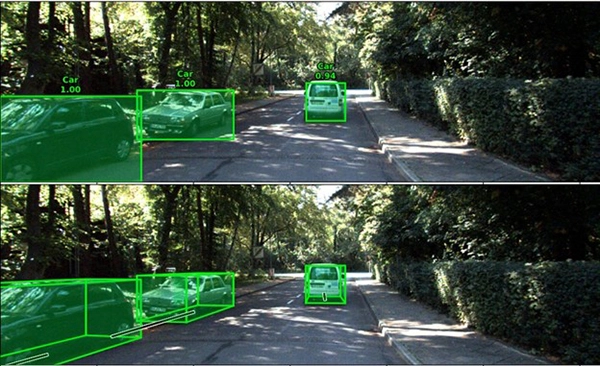
شناسایی و ردیابی سهبعدی (3D Detection and Tracking)
یکی از مهمترین چالشها در بینایی سهبعدی، توانایی شناسایی و دنبالکردن دقیق اشیاء در فضای سهبعدی است. این قابلیت برای رباتیک، خودروهای خودران و سیستمهای نظارتی حیاتی است. فناوریهایی مانند PointNet++، RangeDet و Fast Point R-CNN به ماشینها امکان میدهند تا اشیاء مختلف را شناسایی کرده و موقعیت و حرکت آنها را در فضا پیشبینی کنند.
بخشبندی سهبعدی (3D Segmentation)
بخشبندی سهبعدی به معنای تقسیم یک صحنه یا محیط به بخشهای مجزا است که به ماشینها اجازه میدهد اشیاء را از زمینه یا محیط اطرافشان جدا کنند. الگوریتمهایی مانند DGCNN و RangeNet++ در این زمینه کاربرد فراوانی دارند. این فناوری به ویژه در حوزه پزشکی اهمیت دارد. به عنوان مثال، سیستمهای تصویربرداری پزشکی با استفاده از بخشبندی سهبعدی، قادر به جدا کردن دقیق تومورها از بافتهای اطرافشان هستند که این امر به تشخیص بهتر و درمان دقیقتر کمک میکند.
پیشبینی شبکه قرارگیری سهبعدی (3D Occupancy Grid Prediction)
در این فرآیند، ماشینها محیط اطراف خود را به گونهای نقشهبرداری میکنند که فضاهای اشغالشده و آزاد به صورت دقیق مشخص شوند. الگوریتمهایی مانند OccNet و VoxelCNN در این حوزه کاربرد دارند. یکی از کاربردهای مهم این فناوری در رباتهای انباری است که با تشخیص فضاهای آزاد و موانع، مسیرهای امن و بهینه را برای حرکت خود برنامهریزی کرده و به این ترتیب از برخورد با موانع جلوگیری میکنند.
بازسازی ساختار از حرکت (Structure from Motion - SfM)
بازسازی ساختار از حرکت، فرایندی است که طی آن با استفاده از مجموعهای از تصاویر دوبعدی که از زوایای مختلف یک صحنه گرفته شدهاند، یک مدل سهبعدی از آن صحنه ساخته میشود. فناوریهایی مانند COLMAP و GLOMAP میتوانند با ترکیب دادههای تصویری متعدد، مدلهای دقیق و واقعگرایانه سهبعدی بسازند. این روش کاربرد ویژهای در حوزه باستانشناسی دارد.
مکانیابی و نقشهبرداری همزمان (Visual SLAM)
مکانیابی و نقشهبرداری همزمان یا Visual SLAM یکی از فناوریهای پیشرفته در بینایی سهبعدی است که به ماشینها اجازه میدهد تا در محیطهای ناشناخته به صورت بلادرنگ نقشهای از اطراف خود ایجاد کرده و همزمان موقعیت دقیق خود را نیز رهگیری کنند. الگوریتمهایی مانند ORB-SLAM و LeGO-LOAM در این زمینه کاربرد دارند. این فناوری بهویژه در رباتهایی کاربرد دارد که نیاز دارند بهسرعت مسیرهای جدید را شناسایی کرده، نقشههای بهروزی از محیطهای داخلی و پیچیده بسازند و بتوانند بدون دخالت انسان، بهصورت مستقل خدماترسانی کنند.
این مجموعه فناوریها و الگوریتمها پایه و اساس "تفکر ماشینها" در حوزه بینایی سهبعدی را تشکیل میدهند و نقش کلیدی در ارتقای هوشمندی و قابلیتهای عملی ماشینهای مدرن ایفا میکنند. توسعه و بهبود این فناوریها به ماشینها امکان میدهد تا نه تنها محیط را ببینند، بلکه آن را درک کرده و واکنشهای هوشمندانه و بهینه به آن نشان دهند.

کاربردهای واقعی بینایی ماشین سهبعدی: تحول در صنایع مختلف
فناوری بینایی ماشین سهبعدی (3D Computer Vision) نه تنها به ماشینها امکان میدهد تا محیط پیرامون را بهصورت فضایی درک کنند، بلکه در حال دگرگون ساختن طیف گستردهای از صنایع با کاربردهای نوآورانه، دقیق و هوشمندانه است. در ادامه با مهمترین کاربردهای آن در دنیای واقعی آشنا میشویم.
خودروهای خودران: رانندگی ایمنتر با درک فضایی
یکی از برجستهترین کاربردهای بینایی سهبعدی در صنعت خودروهای خودران است. این فناوری به وسایل نقلیه خودران امکان میدهد تا عابران پیاده، علائم راهنمایی و رانندگی، چراغها، موانع و سایر وسایل نقلیه را بهصورت real time شناسایی کرده و موقعیت دقیق آنها را در فضا درک کنند. با استفاده از ترکیب حسگرهایی مانند LiDAR، دوربینهای استریو و الگوریتمهای تشخیص سهبعدی، خودروها میتوانند مسیرهای ایمن را انتخاب کرده و از تصادفات جلوگیری کنند.
سلامت و پزشکی: تشخیص دقیقتر با تجزیه و تحلیل سهبعدی
در حوزه پزشکی، بینایی سهبعدی نقش مهمی در تجزیه و تحلیل تصاویر پیچیده مانند عکسهای رادیولوژی (X-ray)، سیتیاسکن (CT) و امآرآی (MRI) ایفا میکند. الگوریتمهای بخشبندی سهبعدی میتوانند تومورها، ضایعات بافتی یا ساختارهای داخلی بدن را بهدقت تفکیک کرده و به پزشکان کمک کنند تا بیماریها را سریعتر و دقیقتر تشخیص دهند. این فناوری همچنین در جراحیهای رباتیک، تصویربرداری سهبعدی از ارگانها و حتی برنامهریزی قبل از عمل جراحی استفاده میشود.
رباتیک: تعامل هوشمند با دنیای واقعی
در صنعت رباتیک، بینایی ماشین سهبعدی به رباتها این امکان را میدهد که محیط پیرامون خود را درک کرده و با آن به شکلی هوشمندانه تعامل داشته باشند. رباتهای انبارداری، تولیدی و خدماتی میتوانند با استفاده از بینایی سهبعدی موانع را شناسایی کرده، اشیاء را با دقت بالا برداشته و جابجا کرده و در محیطهای پیچیده بدون برخورد حرکت کنند. این قابلیتها در اتوماسیون صنعتی، خطوط تولید هوشمند و خدمات تحویل کالا نقش حیاتی دارند.

واقعیت افزوده (AR) و واقعیت مجازی (VR): تجربهای فراگیر و تعاملی
بینایی سهبعدی، پایه و اساس فناوریهای واقعیت افزوده و واقعیت مجازی را تشکیل میدهد. با ایجاد درک فضایی دقیق از محیط اطراف، کاربران میتوانند در دنیای مجازی تعامل داشته باشند، اشیاء را از زوایای مختلف مشاهده کنند و تجربهای کاملاً غوطهور بهدست آورند. این فناوری در بازیهای ویدیویی، آموزش مجازی، خرید آنلاین (مانند امتحان کردن لباس یا مبلمان) و طراحی داخلی کاربردهای گستردهای دارد.
بازسازی سهبعدی: نگهداری و طراحی محیطهای فیزیکی
بازسازی سهبعدی یکی از کاربردهای مهم بینایی ماشین سهبعدی در حوزههایی مانند معماری، باستانشناسی و برنامهریزی شهری است. با استفاده از الگوریتمهای تجزیه و تحلیل تصاویر به صورت سهبعدی، میتوان نسخههای دیجیتالی دقیق و واقعگرایانهای از ساختمانها، آثار تاریخی یا حتی کل شهرها تهیه کرد. این مدلها به طراحان کمک میکنند تا پروژههای معماری را با دقت بالا برنامهریزی کرده و به متخصصان میراث فرهنگی اجازه میدهد آثار تاریخی را بهصورت دیجیتالی حفظ کنند.
بینایی ماشین سهبعدی با فراهم آوردن درکی فضایی و عمیق از جهان اطراف، در حال تبدیل شدن به ابزاری کلیدی در تحول دیجیتال صنایع مختلف است و آیندهای هوشمندتر و دقیقتر را رقم میزند.

چالشهای بینایی ماشین سهبعدی: موانعی در مسیر پیشرفت هوش مصنوعی فضایی
با وجود رشد چشمگیر فناوری بینایی ماشین سهبعدی و نقش کلیدی آن در توسعه هوش مصنوعی و اتوماسیون پیشرفته، این حوزه همچنان با چالشهای فنی و محاسباتی پیچیدهای روبهرو است. درک بهتر این چالشها میتواند به توسعه راهکارهای کارآمدتر کمک کرده و مسیر پیشرفت این فناوری را هموارتر سازد.
نیاز بالا به توان محاسباتی: قدرت پردازش، یک الزام حیاتی
یکی از اصلیترین چالشهای بینایی سهبعدی، نیاز به توان محاسباتی بسیار بالا برای پردازش دادههای حجیم بصری و عمقی است. الگوریتمهای مدرن مانند شبکههای عصبی سهبعدی، تجزیه و تحلیل نقطهای (Point Cloud Processing)، و بازسازی بلادرنگ محیط، همگی به سختافزارهای قدرتمند مانند GPUهای پیشرفته و معماریهای محاسباتی بهینه نیاز دارند. همچنین در این زمینه میتوان از آی سیهای فوتونیکی بهره برد. این آی سیها با فراهم کردن پردازش سریع و موازی دادههای تصویری با مصرف انرژی پایین، توان محاسباتی در بینایی ماشین را افزایش میدهند و برای وظایف real time مانند تشخیص تصویر و لبهیابی بسیار مناسب هستند. در کاربردهایی مانند خودروهای خودران یا رباتهای صنعتی، این نیاز به پردازش در لحظه به یک الزام فنی حیاتی تبدیل میشود.
دقت در محیطهای پویا و شلوغ: عمقیابی در شرایط واقعی
محیطهای دنیای واقعی معمولاً دارای پویایی بالا، اجسام متحرک، نور متغیر و صحنههای بههمریخته هستند. در چنین شرایطی، الگوریتمهای بینایی ماشین سهبعدی با دشواریهای زیادی در استخراج اطلاعات عمق دقیق، تشخیص اشیاء متحرک و حفظ ثبات درک فضایی مواجه میشوند. این موضوع بهویژه در مکانهایی مانند خیابانهای شلوغ، انبارهای بزرگ یا اتاقهای پر از اشیاء، چالشبرانگیز است و نیازمند توسعه مدلهای تطبیقی و مقاوم در برابر نویز محیطی خواهد بود. یکی از روشهایی که میتواند با این چالش مقابله کند، استفاده از آی سیهای کوانتومی برای تجزیه و تحلیل تصاویر است. آی سیهای کوانتومی میتوانند دقت بینایی ماشین را در محیطهای شلوغ با استفاده از ویژگیهای کوانتومی مانند برهمنهی و درهمتنیدگی افزایش دهند. این ویژگیها امکان پردازش دادههای پیچیده و با ابعاد بالا را فراهم میکنند و باعث بهبود تشخیص اشیاء و ردیابی دقیقتر در صحنههای متراکم میشوند. همچنین، الگوریتمهای کوانتومی توانایی بالاتری در مدیریت ابهام و پوشیدگی اجسام دارند که میتواند نسبت به سامانههای تشخیص تصویر سنتی، تفسیر بصری دقیقتری در اختیار کاربر قرار دهد.
محدودیتهای زمان واقعی: نیاز به تصمیمگیری آنی
یکی از مهمترین نیازهای عملیاتی در بسیاری از کاربردهای بینایی سهبعدی، مانند رانندگی خودکار یا رباتهای امدادگر، قابلیت تصمیمگیری در زمان واقعی (Real-Time Processing) است. فناوری باید بتواند در کسری از ثانیه دادهها را تحلیل کرده، مسیر مناسب را شناسایی کرده و واکنش دقیق و ایمن نشان دهد. این الزام، فشار زیادی بر الگوریتمها و سختافزار وارد میکند و گاهی مرزهای توانمندیهای فعلی فناوری را به چالش میکشد. طراحی الگوریتمهای سبکتر، سریعتر و با دقت بالا همچنان یکی از اولویتهای محققان در این حوزه است. محققان در حال بررسی استفاده از آی سیهای فوتونیک برای رفع این چالش هستند. آی سیهای فوتونیک یا PICها با استفاده از نور برای انجام محاسبات سریع و موازی به صورت مستقیم روی سیگنالهای نوری، امکان پردازش بلادرنگ در بینایی ماشین را فراهم میکنند. این قابلیت باعث میشود وظایفی همچون فیلترگذاری تصویر و اجرای شبکههای عصبی با کمترین تاخیر و به صورت بلادرنگ انجام شود.
عبور از موانع: محرک نوآوری در بینایی ماشین سهبعدی
با وجود این چالشها، نیاز به بینایی فضایی دقیقتر و هوشمندتر، موتور اصلی نوآوری در این حوزه است. پژوهشگران و شرکتهای فناوری در سراسر جهان بهطور مداوم در حال طراحی روشهای نوین برای بهینهسازی عملکرد، کاهش مصرف منابع و ارتقای دقت بینایی ماشین سهبعدی هستند. عبور از این موانع، نه تنها کاربردهای فعلی را ارتقا خواهد داد، بلکه افقهای جدیدی را برای استفاده از این فناوری در زندگی روزمره و صنعت باز خواهد کرد. در ادامه به نحوه بهرهگیری برخی از شرکتهای بزرگ از این فناوری نگاهی میاندازیم.
راهکارهای بینایی ماشین اینتل
اینتل با بهرهگیری از تخصص خود در طراحی تراشهها و سختافزارهای پیشرفته، راهکارهای جامعی برای بینایی ماشین ارائه داده است. این شرکت با نرمافزارهایی مانند AI Pipeline و پلتفرم OpenVINO، توسعه و استقرار مدلهای هوش مصنوعی را برای کسبوکارها آسان کرده و امکان اجرای این مدلها را روی طیف گستردهای از سختافزارها، از لبه شبکه تا فضای ابری، فراهم ساخته است. همچنین با پلتفرم Intel Geti، ارتباط مؤثر بین متخصصان فنی و کاربران غیرتکنیکال برقرار کرده تا فرایند آموزش و بهکارگیری مدلها تسهیل شود. انعطافپذیری بالا، بهرهگیری از ابزارهای متنباز و پشتیبانی سختافزاری قدرتمند، اینتل را به یکی از بازیگران کلیدی در حوزه بینایی ماشین تبدیل کرده است.
بینایی ماشین در NVIDIA: از GPU تا جلسات هوشمند
انویدیا با معرفی پلتفرم NVIDIA AI Enterprise، بینایی ماشین را در قالبی جامع و ابری برای سازمانها فراهم کرده است. این پلتفرم با تمرکز بر هوش مصنوعی مولد، پردازش تصویر و گفتار، به کسبوکارها کمک میکند تا بهرهوری خود را افزایش دهند و سریعتر پروژههای AI را به تولید برسانند. فناوری NVIDIA Maxine بهطور خاص برای بهبود جلسات ویدئویی طراحی شده و با قابلیتهایی مانند حذف پسزمینه بدون پرده سبز، همترازی چهره، اصلاح نگاه و افزایش وضوح تصویر، تجربه ارتباطات دیجیتال را به سطحی بالاتر میبرد. انعطاف در استقرار در محیطهای محلی، ابری یا لبه نیز یکی از نقاط قوت اصلی این راهکار محسوب میشود.
پلتفرم هوش بینایی کوالکام برای دستگاههای IoT
کوالکام با پلتفرم Vision Intelligence خود، بینایی ماشین را به سطح جدیدی در دستگاههای اینترنت اشیاء رسانده است. این پلتفرم با ترکیب پردازش تصویر و هوش مصنوعی، در دوربینهای امنیتی، صنعتی و خانگی کاربرد دارد و عملکرد سریع و دقیقی را فراهم میآورد. یکی از نمونههای موفق این فناوری، اپلیکیشن iOnRoad است که با تشخیص دقیق اشیاء در ویدئوهای موبایلی، برنده جایزه طراحی CES شده است. استفاده از ابزار FastCV و پردازندههای Snapdragon باعث بهبود عملکرد تا 15 درصد و افزایش 30 درصدی سرعت تبدیل تصویر شده است، در حالی که ادغام ساده و قابلیت اجرا روی پردازندههای با فرکانس پایین، آن را به راهکاری انعطافپذیر و کارآمد برای صنایع مختلف تبدیل کرده است.
سونی و تحول بینایی ماشین در لبه شبکه
سونی با پلتفرم Aitrios و دوربینهای IMX500 و IMX501، بینایی ماشین را مستقیماً در منبع تصویر یعنی دوربین پیادهسازی کرده است. این رویکرد با استفاده از تراشههای Sony Stack، محاسبات AI را در سطح پیکسل انجام داده و تنها دادههای ضروری مانند متادیتا را ارسال میکند، که نتیجه آن کاهش فشار بر پهنای باند و پردازش سریعتر در لبه شبکه است. فناوری Aitrios با پشتیبانی از TinyML و اتصال به سرویسهای ابری مانند Azure، امکانات گستردهای برای توسعه و استقرار مدلهای هوش مصنوعی فراهم میآورد. این راهکار در فروشگاهها برای مدیریت موجودی، تحلیل رفتار مشتری و ارتقای امنیت بهکار میرود. این امر سونی را به شرکت پیشگام در حوزه پردازش تصویری دقیق و کمهزینه در محیطهای لبه تبدیل کرده است.
آینده بینایی ماشین سهبعدی
آینده بینایی ماشین سهبعدی نوید یک تحول بنیادین در دنیای فناوری را میدهد. این حوزه با بهرهگیری از پیشرفتهترین تکنیکها مانند Gaussian Splatting و NeRF (Neural Radiance Fields) در حال توسعه قابلیتهایی است که امکان بازسازیهای فوقواقعگرایانه از محیطهای واقعی را فراهم میکنند. این فناوریها در کاربردهایی مانند بازیهای ویدیویی فراگیر، گردشگری مجازی، طراحی شهری و معماری دیجیتال، درک فضایی را به سطحی بیسابقه میرسانند.
با پیشرفت الگوریتمهای پردازش داده و دسترسی بیشتر به سختافزارهای پیشرفته، بینایی ماشین سهبعدی بهزودی وارد دستگاههای روزمره ما خواهد شد. از طراحی خانه رؤیایی با استفاده از اپلیکیشنهای واقعیت افزوده گرفته تا استفاده از رباتها در جراحیهای دقیق و عملکرد ایمنتر خودروهای خودران، این فناوری در حال ایجاد تغییرات اساسی در شیوه زندگی ماست. آیندهای که در آن ماشینها نهتنها میبینند، بلکه دنیای اطراف را با دقتی انسانی درک و تفسیر میکنند، بهسرعت به واقعیت تبدیل میشود.